廣州松下機器人焊接自動化生產廠家
發布時間:2022-11-09 00:33:22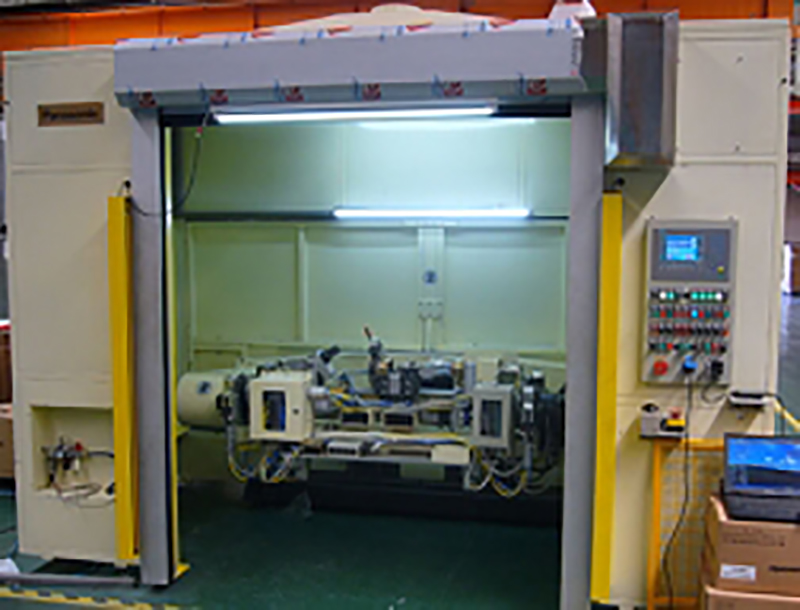
廣州松下機器人焊接自動化生產廠家
1、運行經示教轉化成的程序,稱之為程序的重現。在重現的情況下,能夠選擇斷點調試、單循環、接連積極等循環系統方式。2、下單種類出產接連出產、多種類交替出產、不一樣種類任意出產等出產方式,因而有各種各樣程序的發動方式。比如單種類可以用程序循環系統或反復發動程序,多種類交替能夠由程序順序調用或指定發動,不一樣種類能夠歷經指定程序發動也許積極產品工件分辨等方式,而對指定程人工草坪序又可分成指定標準啟用與立即指定發動,各種各樣發動方式的選擇主要根據是夠能夠很好地進行工作的順利開展。

廣州松下機器人焊接自動化生產廠家
鋰電更換。排熱電風扇查詢。電纜查詢(接地裝置電纜、開關電源電纜、操控電纜)。示教器實際操作控制面板每個按鈕是否一切正常。操控箱里除塵。、電焊焊接開關電源(內部除塵、對接有一些有無松脫)焊機(噴頭清掃、送絲管有無阻塞、絕緣層是否一切正常、支氣管有無漏汽、電纜有無松脫、危害)。全自動機器人焊接送絲機器設備(送絲輪是否有磨損、SUS管有無危害、磨損、送絲電機是否異常)。運作時是否有異常。定位銷是否有磨損。

廣州松下機器人焊接自動化生產廠家
盡管是自動控制系統的,精準度很高,但焊接機器人的姿勢也不是萬無一失的,在因素的影響下,它在具體焊接全過程中也會產生多種不一樣的難題。有關的情況和解決方法如下所示,供各位參照。查驗焊接品質的情況下發覺,焊接機器人發生了焊接位置有誤的難題,此刻應當關鍵檢查一下智能機器人各軸的零位置,好是再次校零給予調整。與此同時,當焊接主要參數選取不合理,或者焊機位置錯誤的情況下,具非常容易導致錯口難題的造成,必須對每個性能參數和位置開展恰當的調節。

廣州松下機器人焊接自動化生產廠家
1、一般程序均歷經示教生成,示教是將主要生成一個新程序構造。機器人歷經示教盒開展示教。示教時,機器人在示教盒軸實際操作鍵的操控下,按特定的坐標值或骨關節開展姿勢,機器人在作業者的操控下,向要求的方向點挪動,當判斷示教點合理是,操控器生成健身運動命令,一起記述那時的各軸方向數據信息,做為程序中相對應健身運動控制指令的有關方向數據信息。2、經示教生成的程序,一般要歷經試運行,對程序開展定期檢查調節。尤其是針對氬弧焊電焊焊接程序,期間的多種加工工藝主要參數與姿勢方式,一般要歷經頻繁、不斷的調節,才可以得到良好的實際效果。